Overview
High performance free from vibrations in manual operation.
Drift and electromagnetic disturbance are critical problems in patch clamping work. This mechanical micromanipulator was developed specifically for patch clamping: it does not employ a liquid hydraulic system (which is prone to drift caused by temperature changes), has no spring (a common cause of mechanical drifting), nor a motor (which is a source of noise). Its body is designed to absorb vibrations, so that even at high magnifications, problems of vibrations are virtually non-existent. Based on a drum type design, which is highly reputed as a liquid hydraulic method, and with a very stable center of gravity, this model provides exceptionally steady and stable performance. The overall design is compact, so installation requires a minimum of space. With coarse and fine manipulators integrated in the compact body, this model handles a full range of required movements, from moving a microelectrode into the microscope view field to making contact with the cell.
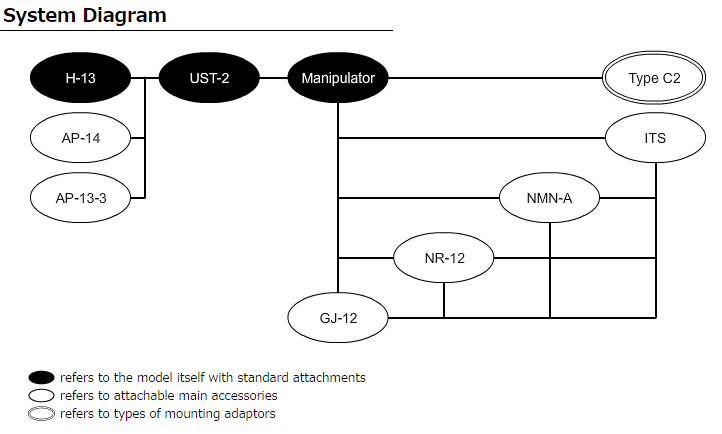
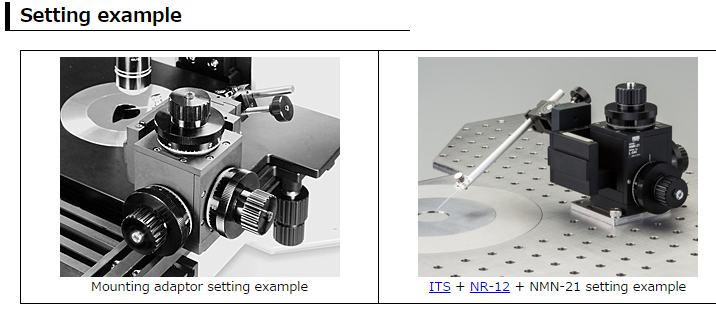
- For attachment to the microscope, a suitable mounting adaptor is required (sold separately).
- The micromanipulator can be mounted directly on the isolation table.
- This model can be firmly fixed to any part of the isolation table with GJ-12 magnetic stand (sold separately).
- AP-13-3/AP-14 patch clamp headstage holders can be attached on the UST-2 solid universal joint, incorporated in the manipulator.
Achieving low vibration operation
The slider, which is one of the main mechanisms of a micromanipulator, actually consists of two independent sliders – one used inside, the other outside. When the operator touches the control knob, which is connected to one slider, vibrations are caused. To overcome this problem, the control knob is fixed independently, separate from the slider.
Last Updated on May 13, 2021